sync.Mutex:标准库的互斥锁实现
是什么
sync.Mutex 是 go 原生提供的互斥锁实现,也是最基本的同步原语了
合理利用锁即可避免并发编程中由于竞争引发的一些逻辑错误
Quick Start
sync.Mutex 对外暴露的接口有三个
- sync.Mutex.Lock 请求锁,如果锁忙,则阻塞。
- sync.Mutex.TryLock 请求锁,如果锁忙则,则返回 false。这是非阻塞的获取锁的方式。
- sync.Mutex.Unlock 释放锁
一个简单的例子:
1 | package main |
源码分析
核心结构
1 | type Mutex struct { |
有一个默认的锁实现 Mutex,而且通过接口提供了扩展性,可以通过实现 Locker 接口,来实现自己的互斥锁。所以使用的时候应该用声明 Locker 接口变量,以后想更改实现就会很容易(虽然一般也不会想着去变)
Mutex.state:表示当前锁的状态,长度是 32 位
- 低三位分别表示:锁是空闲还是忙(mutexLocked)、现在阻塞队列头部的 goroutine 正在被唤醒(mutexWoken)、是正常模式还是饥饿模式(mutexStarving)
- 剩余 29位用于记录当前互斥锁上等待的 goroutine 的数目(waiterCount)
state 这个字段可以说是很省了,是一个 4 合 1 的字段
Mutex.sema:控制由于锁而挂起、唤醒的 goroutine 的信号量
主流程
Mutex.Lock
1 | // Lock locks m. |
- 先用 atomic 原子操作,用 CAS 操作试探抢锁,抢锁成功就直接返回
- 抢锁失败了进入 lockSlow 方法做进一步处理
这里单独提取了 lockSlow 方法和之前看过的 sync.Once 里面的操作一模一样,就是为了简化 Lock 函数体,Lock 的 fast-path 部分可以内联优化,这个操作在标准库中应用挺多的
Mutex.lockSlow
这块逻辑挺长的,先看一下这里的关键概念是锁的模式:正常 or 饥饿
正常模式下,新 goroutine 和新唤醒的 goroutine 有同样的资格去自旋抢锁,这里可能出现的问题是新 goroutine 往往是更加活跃的它更可能占据着 cpu 所以取锁的概率会相对更高;为了避免等待队列中的 goroutine 迟迟取不到锁,所以当有 goroutine 等待取锁的时间过长,锁会进入饥饿模式,此时所有 goroutine 按照先来后到的顺序依次进入阻塞队列排队取锁
这里列出源码并添加了详细的注释:
1 | func (m *Mutex) lockSlow() { |
这个 lockSlow 的逻辑还是比较复杂的,大体的逻辑如下:
判断当前情况下能否进入自旋
- 条件一:正常模式
- 条件二:runtime_canSpin(iter)返回值为 true ,查看函数实现可以知道需要同时满足
- 当前互斥锁处于正常模式
- 当前运行的机器是多核CPU,且GOMAXPROCS>1
- 至少存在一个其他正在运行的处理器P,并且它的本地运行队列(local runq)为空
- 当前goroutine进行自旋的次数小于4
如果能进入自旋,则通过循环的方式自旋请求锁,否则直接跳过这一阶段
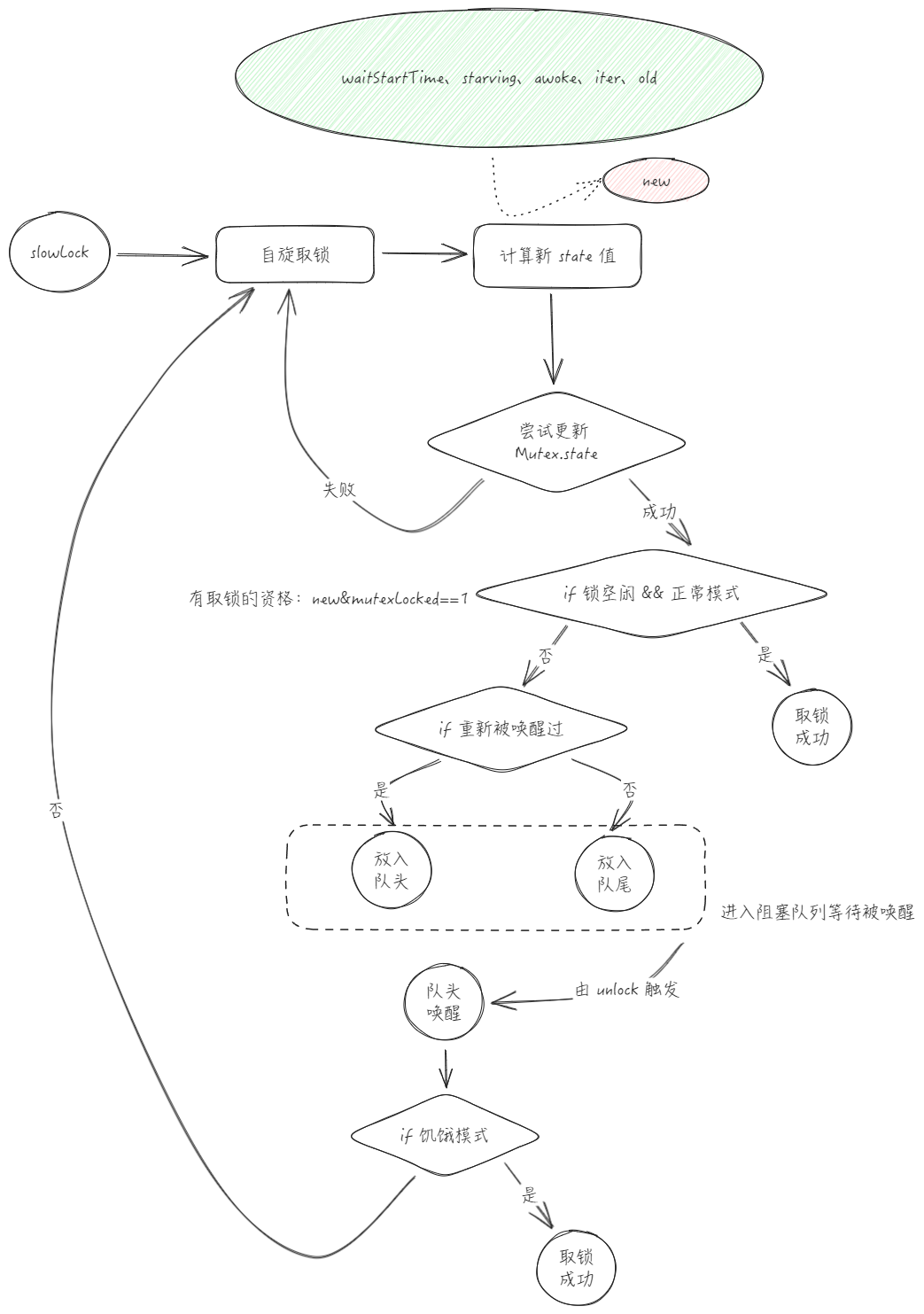
计算互斥锁的新状态:mutexLocked、mutexWoken、mutexStarving
尝试更新互斥锁的状态
如果 2 中计算 state 表明有资格进行抢锁(new state 中 mutexLocked 位是 1),更新这一步就相当于用 CAS 尝试获得锁,如果成功直接返回,失败获取现在 mutex 的状态并回到 1如果 2 中计算 state 表面没有资格进行锁争抢(因为锁已经被其他 goroutine 获取或是此时锁已经处于饥饿模式),则会进入阻塞队列进行等待。新 goroutine 会被放入阻塞队列尾部,已经被唤醒过但是还是没抢到锁的 goroutine 会放到阻塞队列的头部
阻塞队列头部的 goroutine 会因为锁的释放操作而被唤醒,如果唤醒时发现锁已经处于了饥饿模式,那么就能直接获取到锁,如果锁此时处于正常模式,则需要回到 1 中和新 goroutine 一起自旋抢锁
这个部分应该就是 mutex 里最复杂的部分了,总结成流程图如下:
额外总结一下 mutex 的饥饿模式和正常模式:
- 饥饿模式是为了避免大量新的请求互斥锁的 goroutine 的出现导致大量自旋,让进入等待队列的 goroutine 一直抢不到锁引发饥饿的问题
- 正常模式下,新的请求互斥锁的 goroutine 可以通过自旋等待锁的释放,如此可以避免 goroutine 的切换来提高总体的执行效率
- 饥饿模式下,新的请求互斥锁的 goroutine 不允许自旋,直接加入等待队列,按照先来后到取锁
- 等待队列中 goroutine 的唤醒是严格按照 FIFO 来唤醒挂起的
- 进入饥饿模式的条件为:请求锁的等待时间超过 1ms
- 退出饥饿模式的条件为:等待队列为空 或 请求锁的等待时间小于 1ms
Mutex.Unlock
Mutex.Unlock 方法用于释放锁,主干仍然是十分简单,细节都在 unlockSlow 这个辅助函数里
- atomic.AddInt32(&m.state, -mutexLocked) 尝试快速解锁
- 快速解锁失败则调用 m.unlockSlow(new) 慢速解锁
1 | // Unlock unlocks m. |
Mutex.unlockSlow
1 | func (m *Mutex) unlockSlow(new int32) { |
下面就进入 unlockSlow 部分了,这个相对而言也并不复杂
正常模式:
- 如果没有等待者,或者state低三位不全为0,那就不用唤醒等待队列中的 goroutine
- 如果有等待者,就将锁设置为 unlock 并唤醒阻塞队列队头的 goroutine
饥饿模式:
- 直接唤醒等待队列中的下一个 goroutine 即可
其他内容
Mutex.TryLock
源码 + 注释如下
1 | // TryLock tries to lock m and reports whether it succeeded. |
就是把 Lock 的 slow-path 给去掉了,变成一个非阻塞的方法
总结
go 标准库中的 sync.Mutex 实现综合了自旋锁和互斥锁,先尝试自旋,如果能自旋拿到锁,就不用切换 goroutine 了,这样更加高效;如果长时间自旋,就是浪费 cpu 资源,所以多次尝试无果后会将想要拿锁的 goroutine 放到阻塞队列中挂起,当锁被释放时再将位于阻塞队列队头的 goroutine 唤醒
为了避免阻塞队列中挂起的 goroutine 长时间得不到运行,所以锁会有正常模式和饥饿模式。有 goroutine 长时间得不到运行时锁进入饥饿模式,不允许自旋抢锁,所有 goroutine 依据阻塞队列中的次序依次取锁,以这种方式解决饥饿问题
从 sync.Mutex 带有自旋的设计而言,如果我们通过 sync.Mutex 只锁定执行耗时很低的关键代码,例如锁定某个变量的赋值,性能是非常不错的(因为等待锁的goroutine不用被挂起,持有锁的goroutine会很快释放锁)。所以,我们在使用互斥锁时,应该只锁定真正的临界区。